Hi, my name is Johnson. My Chinese name is Zhong Sheng (钟盛) which is pronounced similarly.
I received my PhD in Robotics advised by Dmitry Berenson and co-advised by Nima Fazeli at the University of Michigan. I previously received my B.ASc. in Engineering Science from the University of Toronto with high honors.
I am passionate about building autonomous systems, with a focus on enabling robot manipulation in perceptually challenging environments. My PhD research leverages model-based methods to reason about uncertainty in those complex settings, fusing visual and contact information. Additionally, I develop open source software for robotics research, emphasizing parallelization and performance.
I am a Canadian citizen but have work authorization in the United States under Optional Practical Training (OPT).
Publications

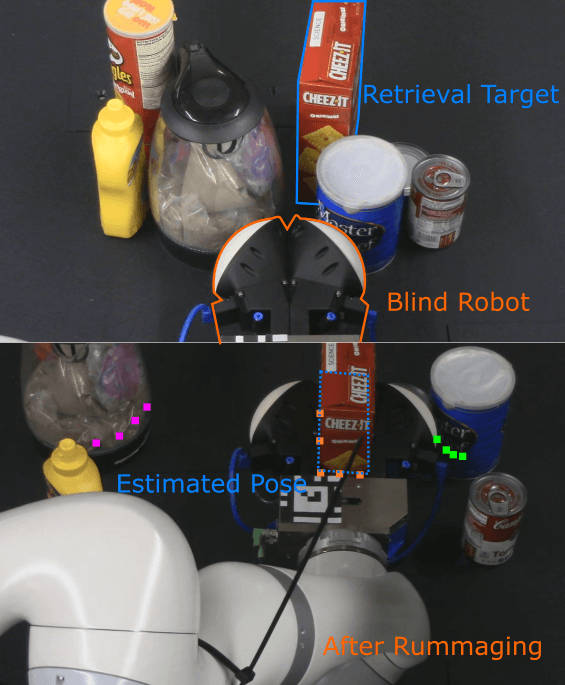
RUMI: Rummaging Using Mutual Information
IEEE Transactions on Robotics (T-RO), 2024 (accepted)